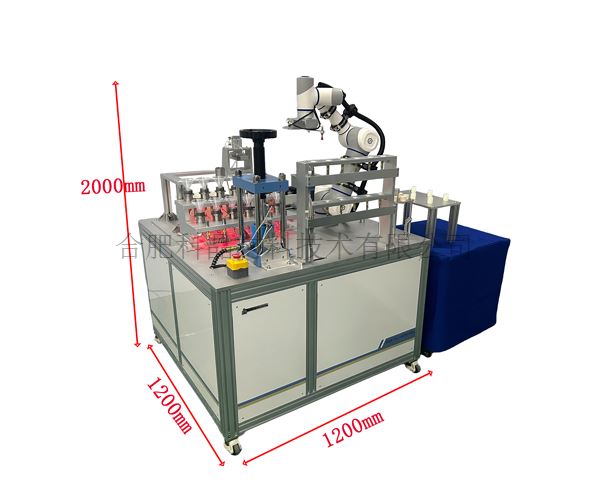
| 設備名稱型號 | ·24T自動化壓片機(程序控制可與機械手配合,帶組裝&脫模功能) YLJ-24T-PE |
||||||||||||||||||||
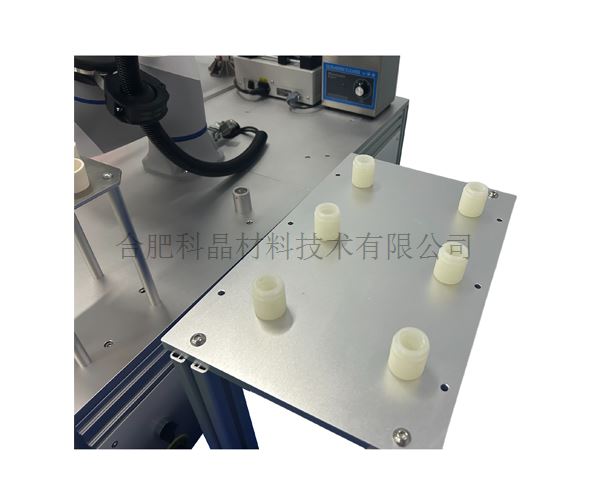
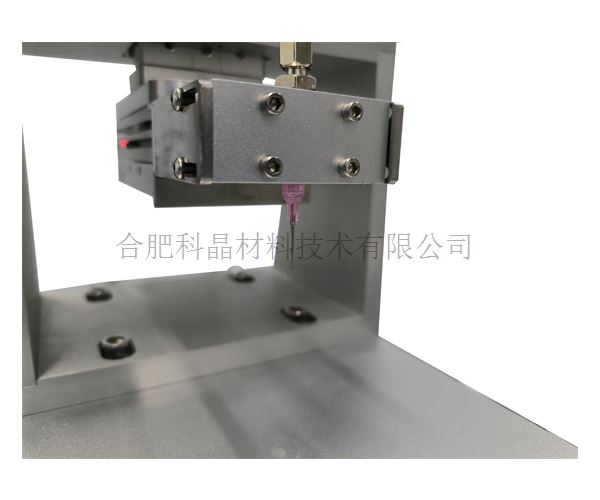
| 自動化裝料、脫模系統(tǒng) | ·由電動壓機、機械手、模具組件等組成的一個自動化系統(tǒng)。裝置在無人干預的情況下按規(guī)定的程序和指令自動進行裝料、壓片、脫模 ·各組件按區(qū)域擺放:模具擺放區(qū)(未使用)、組裝與脫模區(qū)、樣品擺放區(qū)、清洗區(qū)、材料收集區(qū)、 壓料區(qū)域以及使用后的模具擺放區(qū)域,這些區(qū)域圍繞機械手臂擺放。 ·標配12套φ19mm的干壓模具,模具所能承受的最大壓力為22T。模套與上模芯分開擺放(下模芯提前與模套安裝在一起) 模具進料口配有進料漏斗,使物料能直接到達模具的裝料區(qū)域,避免樣品灑落。 ·機械手臂上有一個夾具和一個吸盤,夾具用于夾取模具、樣品管等,吸盤用于吸取模芯與片狀樣品。 配備清洗槽,在結束一次工作流程后,吸盤可以進行清洗,清洗結束后擦拭干凈,然后進行下一段流程。這樣可避免兩個樣品間的相互污染。 ·整個系統(tǒng)操作流程如下: 1、機械手抓取對應位置的模具放置在組裝與脫模區(qū)的指定位置上; 2、機械手抓取樣品管,將粉料倒入模具內部,然后機械手將樣品管投放到材料收集框內; 3、機械手抓取模具上的漏斗投放到材料收集框內; 4、機械手吸盤吸取對應位置的上模芯裝在模具上; 5、機械手夾取模具到壓機油缸的中間位置。壓機開始加壓與保壓工作 6、壓機保壓結束后,油缸泄壓,機械手夾持模具到組裝與脫模區(qū)的脫模套上,然后將整個模具(含脫模套)夾取到壓機油缸的中間位置,進行脫模 7、脫模結束后,機械手夾持模具(含脫模套)到組裝與脫模區(qū)的指定位置 8、機械手抓取整個模具放置到使用后模具擺放區(qū)域的指定位置 9、機械手吸盤進行清洗與擦拭。 10、機械手抓取下一個模具進行裝料、壓料、脫模的循環(huán)操作
|
||||||||||||||||||||
| 壓機 | ·最大壓力:24T(45MPa) ·油缸直徑:60mm ·油缸行程:0-35mm ·工作空間:150*150*150mm ·電壓:AC 220V 50HZ ·功率:180W ·壓力可程序化設置,最高可設定30段壓力程序段,可設置各段壓力以及保壓時間等參數 ·配備油泵電機調速器,可控制升壓速率 ·壓力精度: 高泵速狀態(tài):±0.5MPa 低泵速狀態(tài):±0.1MPa ·數字壓強顯示值對應壓力值如下表所示:
·顯示壓強值與實際液壓缸施加給樣品壓力值1MPa= ~ 0.55 Ton |
||||||||||||||||||||
| 機械手 | ·電源:DC 48V ·功率:150W ·工作半徑:800mm ·最大臂展:990mm ·工作最大速度:3m/s ·關節(jié)活動范圍:±360° ·關節(jié)最大速度:180°/s ·重復定位精度:±0.02mm ·通信接口:RS485 ·通訊方式:TCP/IP, Modbus, 無線網絡
|
||||||||||||||||||||
| 設備外形尺寸 | ·1200mm(L)*1200mm(W)*1610mm(H) |
||||||||||||||||||||
| 凈重 | ·約100kg |
||||||||||||||||||||
| 質保 | ·一年(模具等易損耗件除外) |






Copyright © 2019 合肥科晶材料技術有限公司 版權所有 皖ICP備09007391號-1  皖公網安備 34012302000974號
皖公網安備 34012302000974號











 查看誠信檔案
查看誠信檔案